Nov. 23 - 29, 2015Circuit board prototype (V1.0) assembly
Goal
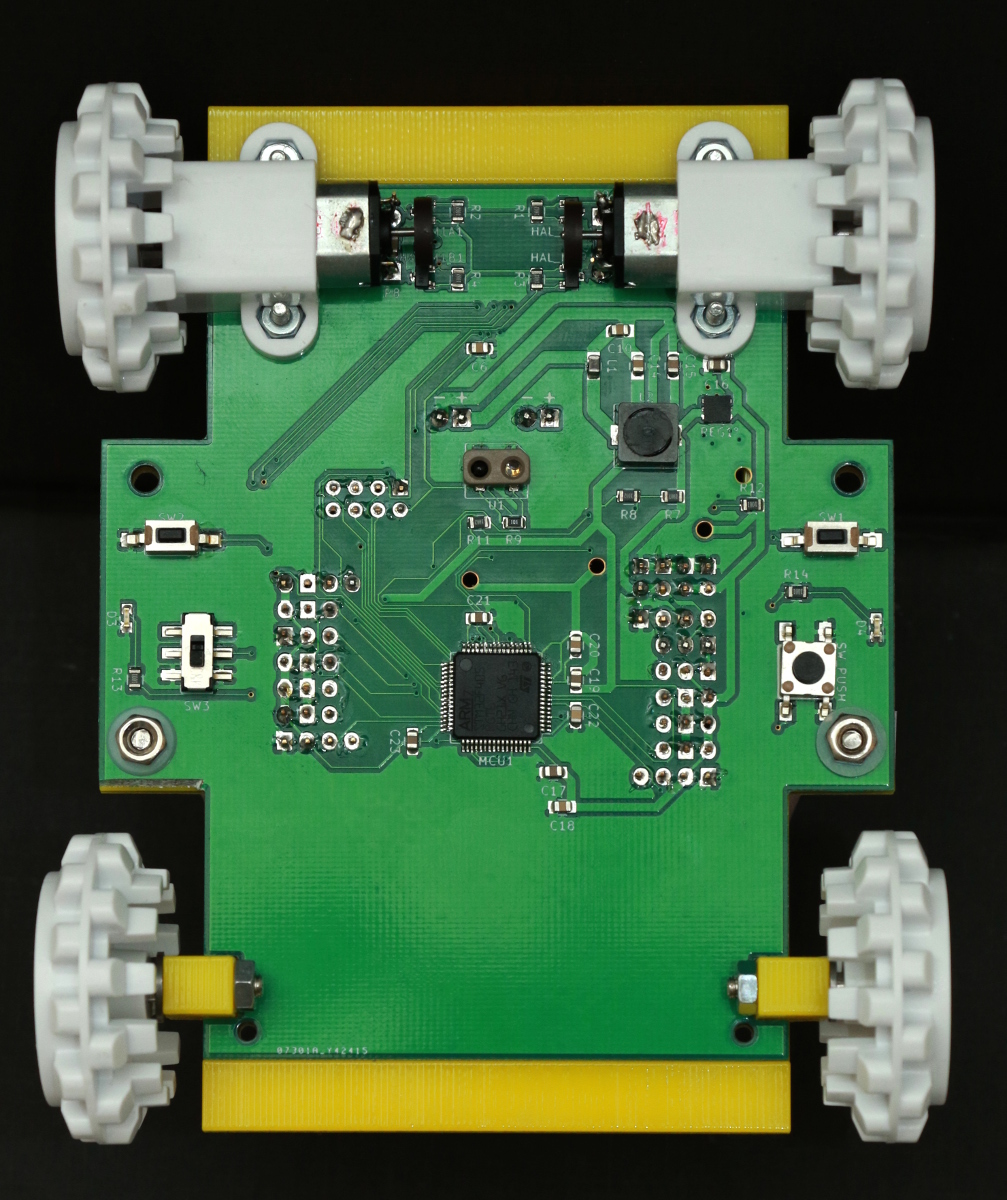
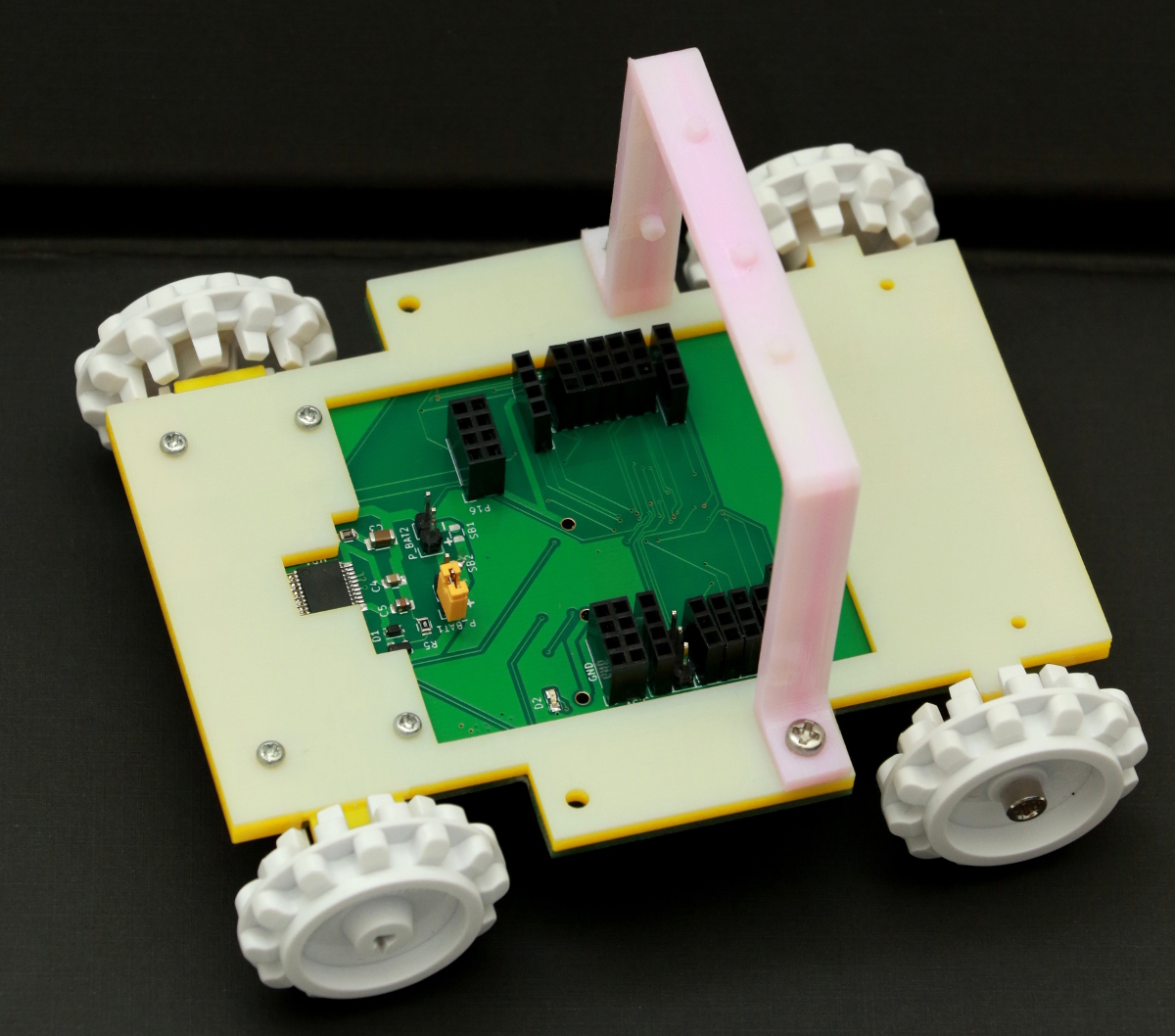
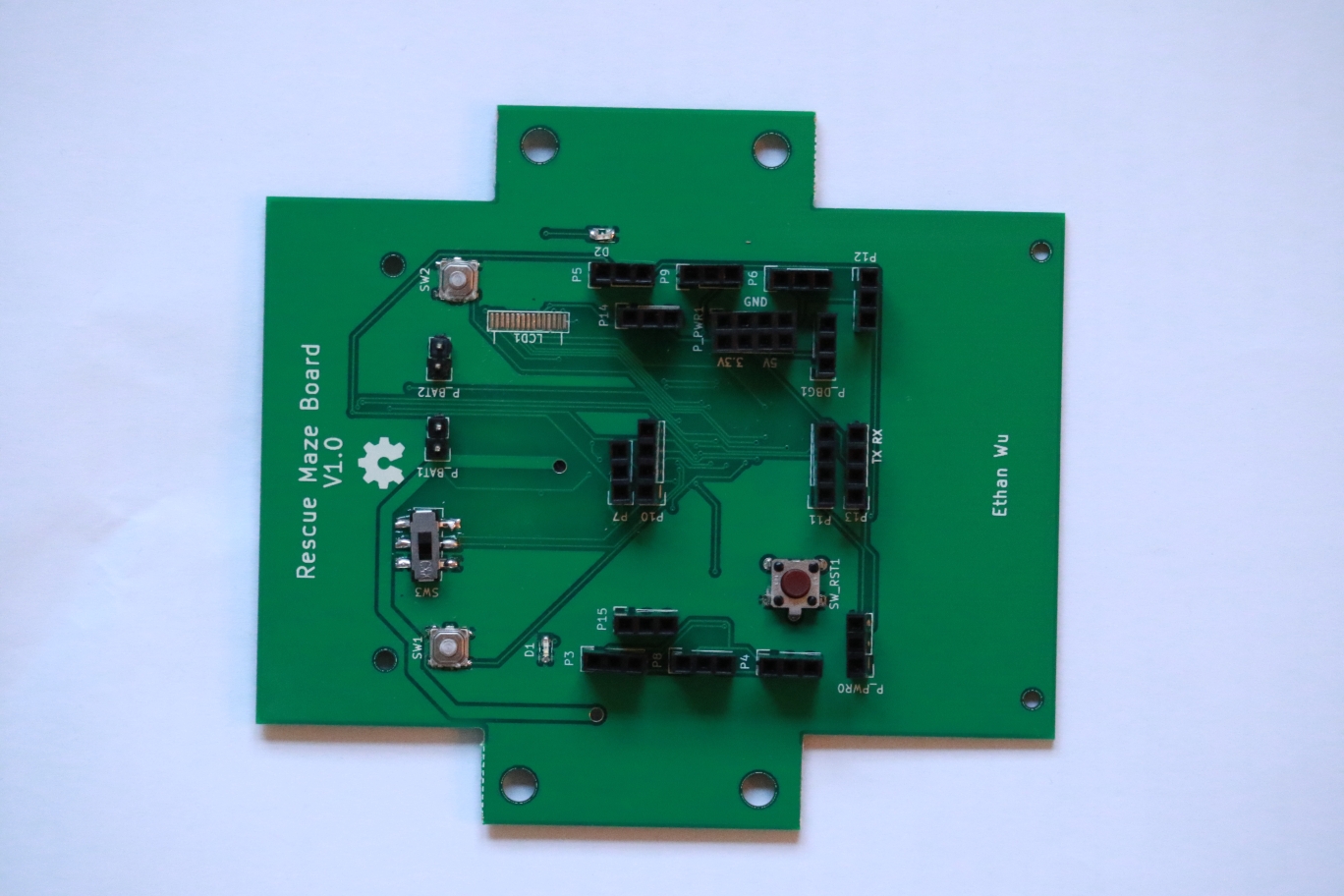
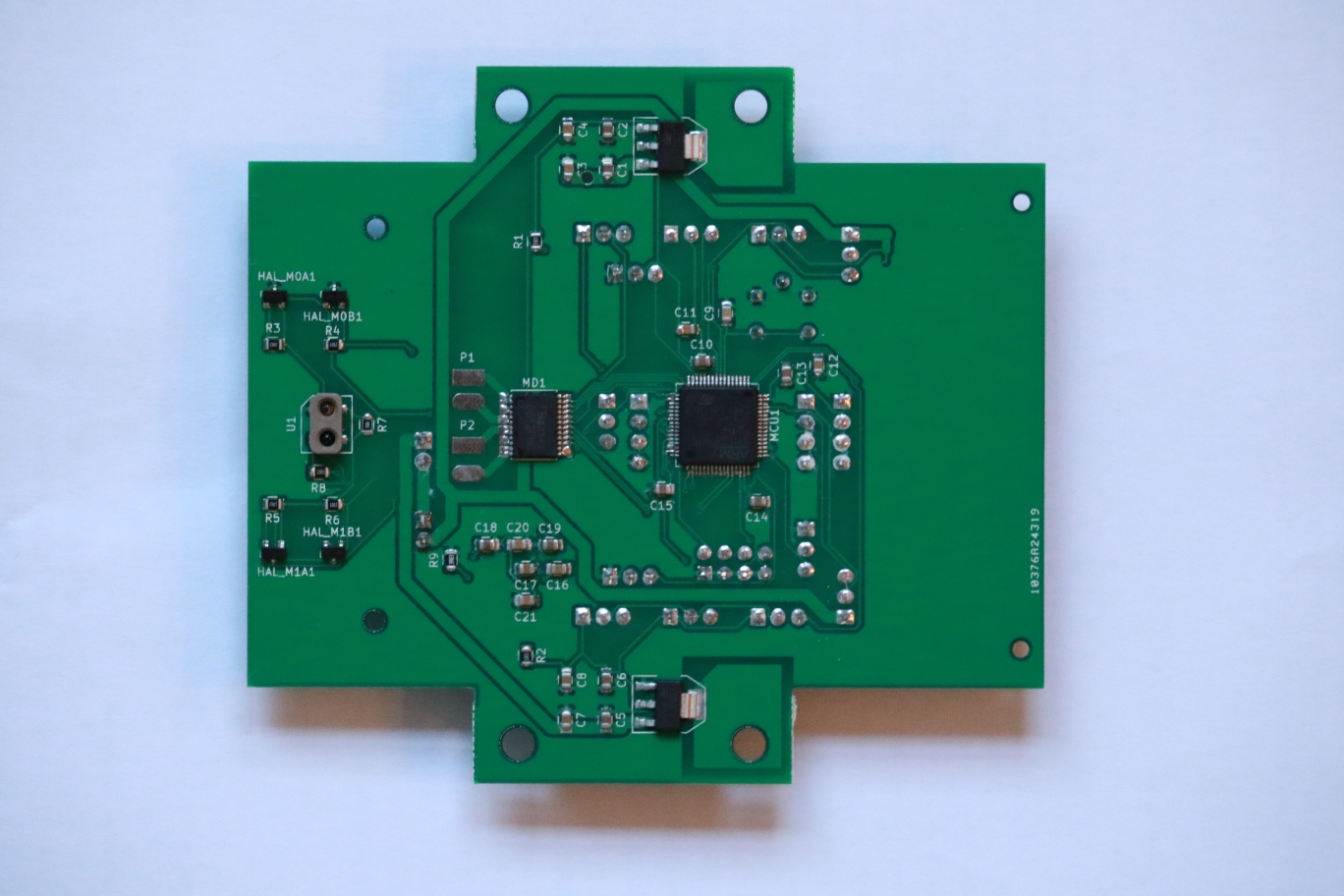
Assemble PCB
- Apply solder paste and place components (about 1 hr)
Reflow board in toaster oven
- Solder paste melted at ~190°C, took out at ~210°C
- Data-logged thermal profile:

cleaned up excess solder bridging on MCU and motor driver
- Soldered pin headers, motors, and buttons by hand
Assembling circuit boards on Thanksgiving
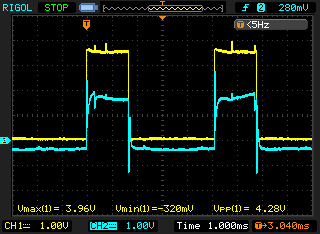
Testing PCB
Supply with constant voltage and current power supply @ 6V
- Able to program MCU
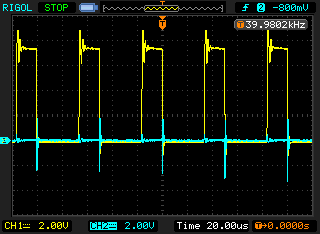
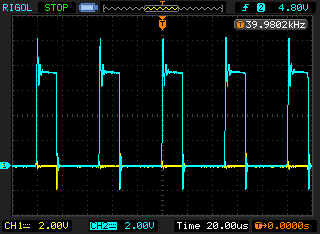
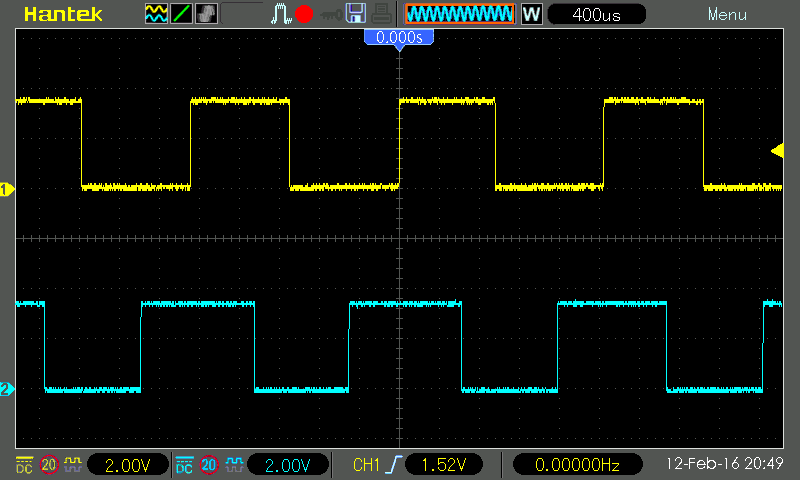
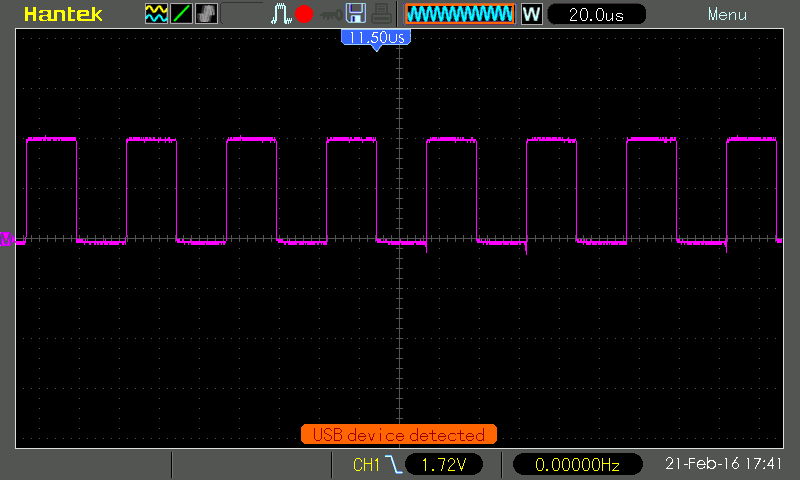
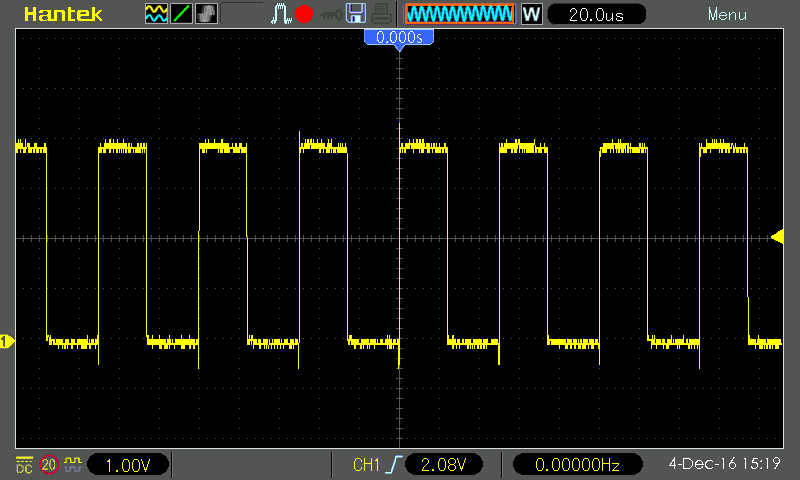
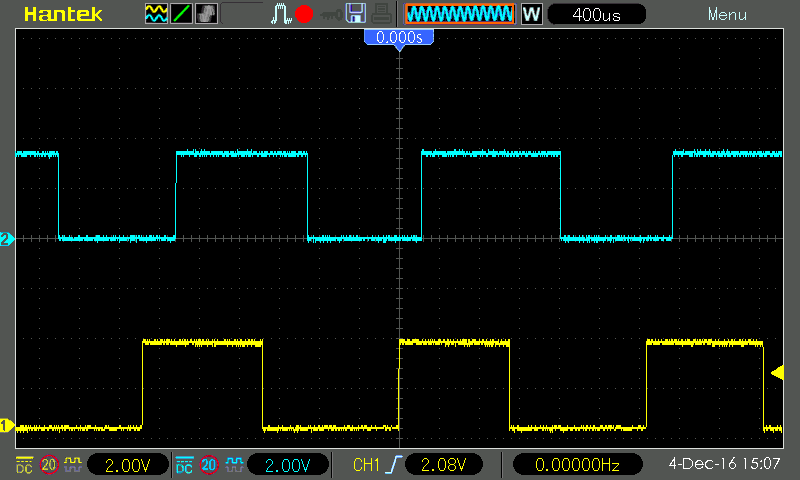
- MCU peripherals (internal clock, timers, ADCs) work
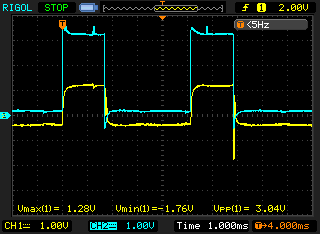
- Motors spin (at low speed)
- Temperatures on MCU and motor driver are low (<30°C)
No issues so far, so increase to 7V
- Still no problems, seems that everything is good!